Descripción
Sistema de control para robot CS-113 mediante interfaz web, utilizando ESP32 con WiFiManager, display OLED y servidor web.
Imagen de la aplicación
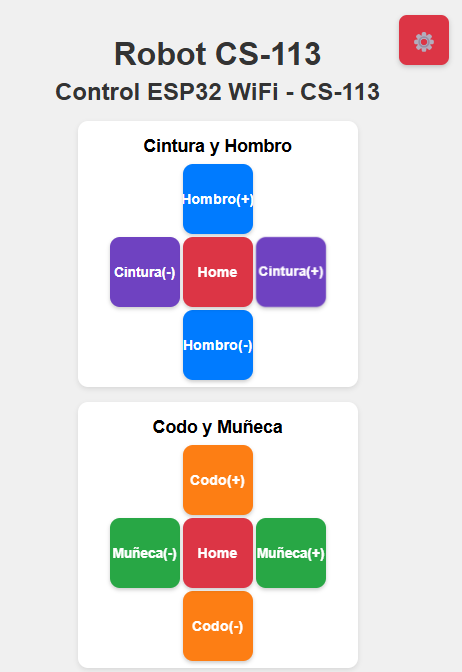
Vista previa
Manual de Usuario
Al iniciar el ESP32:
- 1.- Si la luz azul del ESP32 esta encendida, se puede saber si está generando el portal cautivo o no.
- 2.- Si esta apagada, se puede saber si está conectado a la wifi o no.
Resetear datos de WiFiManager
Mantenemos pulsado el boton 0 del ESP32. El led azul parpadea. Cuando el led azul se queda encendido, soltamos el boton 0.
Nombre del portal cautivo
Nombre del portal cautivo: ESP32- (resto depende del hostname interno del ESP32). Deber ser único para cada ESP32.
Debug
Si se desea ver los datos de debug, se puede conectar el ESP32 a la computadora y abrir el monitor serial a 115200 baudios.
Características Principales
- Interfaz web responsive con dos paneles de control
- Configuración WiFi mediante portal cautivo (WiFiManager)
- Display OLED para feedback en tiempo real
- Sistema dual de reset WiFi (botón físico y web)
- Controles intuitivos para cada articulación
- Feedback visual del estado en OLED
- Sistema de control para robot CS-113
Funcionamiento
Inicialización (setup)
El sistema realiza las siguientes tareas al iniciar:
- Inicia la comunicación serial a 115200 baudios
- Configura la pantalla OLED
- Inicializa WiFiManager
Bucle Principal (loop)
En el ciclo continuo, el sistema:
- Mantiene la conexión WiFi (loopWM)
Diagrama de Conexiones

Componentes Necesarios
- ESP32 DevKit V1
- Pantalla OLED
- Cable USB
- Computadora con Arduino IDE
Librerías Requeridas
- WiFiManager (by tzapu)
- WebServer
- Wire.h
- U8g2lib